Algorithms
The FleetCoreLib project is the algorithmic core of the platform. It provides high-performance implementations for area partitioning and coverage path generation, which are essential for multi-drone survey missions.
1. Recursive Binary Space Partitioning (BSP)
The PolygonPartitioner class implements a recursive BSP algorithm to divide a large survey area (defined as a Polygon) into smaller sub-polygons, each assigned to an individual drone.
How it works:
- Axis-Aligned Bisection: The algorithm identifies the longest axis of the polygon's bounding box (width vs. height).
- Split Line Selection: A split line is created at the midpoint of the longest axis.
- Polygon Clipping: Using a simplified Sutherland-Hodgman approach, the algorithm clips the polygon against the split line, creating two child polygons.
- Recursion: This process repeats recursively until the target number of partitions (matching the drone count) is reached, or until the sub-polygons fall below a minimum area threshold.
2. Boustrophedon (Lawnmower) Path Generation
The MowerSurveyAlgorithm generates a continuous coverage path (zig-zag) for a given sub-polygon.
How it works:
- Sweep-Line Technique: The algorithm iterates from the bottom to the top of the polygon's bounding box using a predefined spacing
- Intersection Calculation: At each step, a horizontal sweep line intersects the polygon's edges.
- Segment Sorting: Intersections are sorted by their X-coordinate and paired to define "internal" segments.
- Zig-Zag State: To ensure a continuous path, the algorithm flips the direction of every alternate segment (left-to-right vs. right-to-left).
BSP Partitioning with Survey Path Generation
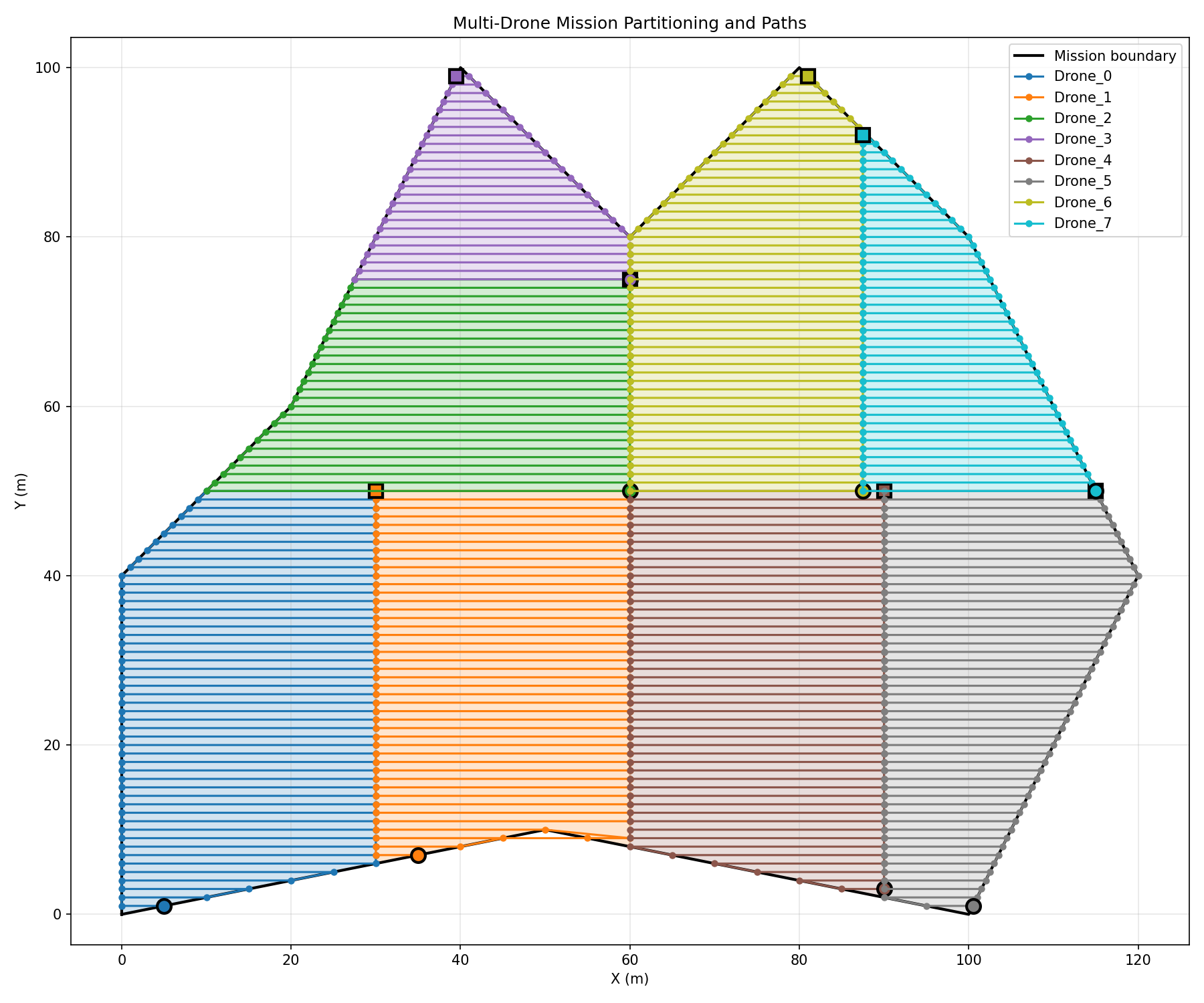 Figure 1: BSP partitioning output with computed lawnmower survey paths for multi-drone coverage.
Figure 1: BSP partitioning output with computed lawnmower survey paths for multi-drone coverage.
API Reference
For a complete list of classes and methods, see the Full API Reference.